|
Jinxuan Xu I am a passionate fifth-year Ph.D. student at the Electrical and Computer Engineering department of Rutgers University, advised by Prof. Yuqian Zhang. And I'm broadly interested in machine learning, deep learning, optimization, Large Language Models (LLM), robotics and federated learning. During my Ph.D., I interned as a research intern at Baidu Research and Kunlun. I am actively seeking new opportunities and welcome discussions about positions aligned with my expertise and passions. Feel free to reach out to explore potential collaborations! |

|
Research
|
|
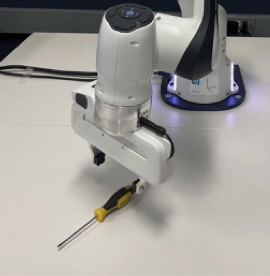
Reasoning Tuning Grasp: Adapting Multi-Modal Large Language Models for Robotic Grasping
Jinxuan Xu, Shiyu Jin, Yutian Lei, Yuqian Zhang, Liangjun Zhang IROS, 2024 (Oral Pitch) project page / arXiv Developed an approach for fine-tuning multimodal LLMs, leveraging their inherent knowledge to generate precise, context-aware numerical grasp poses for robotic arms. |
|
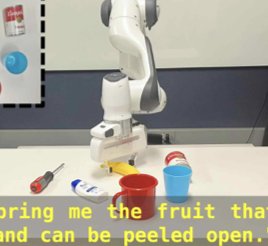
Reasoning Grasping via Multimodal Large Language Model
Shiyu Jin, Jinxuan Xu, Yutian Lei, Liangjun Zhang CoRL, 2024 arXiv Utilized multi-modal LLMs to improve robotic grasping in cluttered environments via indirect user instructions. |
|
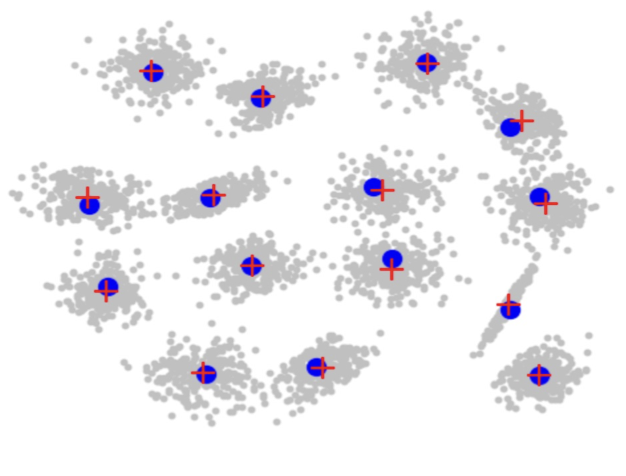
Jigsaw Game: Federated Clustering
Jinxuan Xu, Hong-you Chen, Wei-lun Chao, Yuqian Zhang Transactions on Machine Learning Research (TMLR) arXiv Proposed a federated k-means algorithm to derive global clustering solutions from localized data, which utilizes the properties of traditional k-means geometry and federated learning principles. |
|
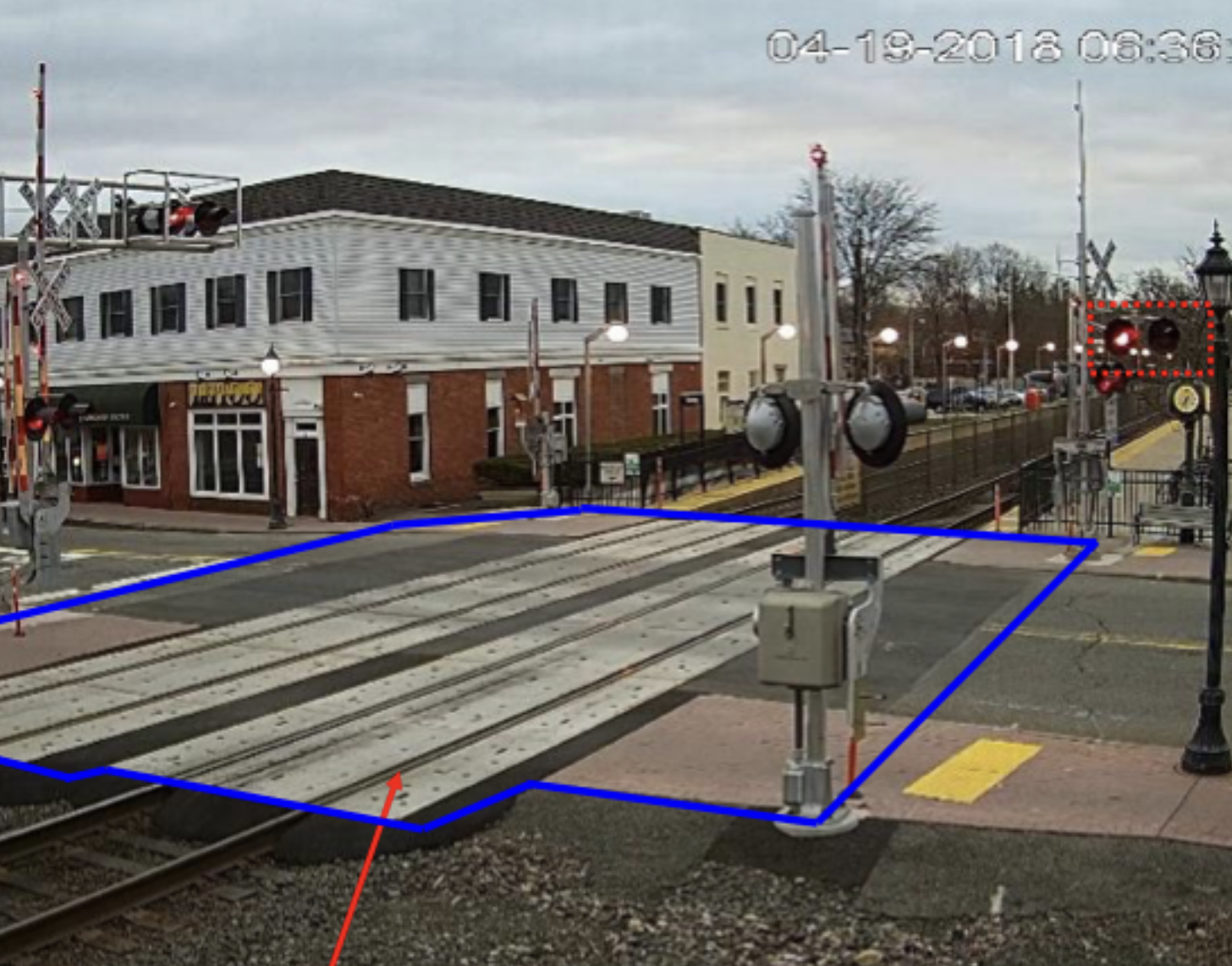
Artificial intelligence-aided railroad trespassing detection and data analytics: Methodology and a case study
Zhipeng Zhang, Asim Zaman Jinxuan Xu, Xiang Liu Accident Analysis & Prevention, 2022 Paper Designed a computer vision based system for detecting trespassing incidents on railroad properties using surveillance video analysis. |